
Undervannsarbeid ved Draugen

Det Haugesundsbaserte selskapet Stolt-Nielsen Seaway som drev med dykking og fjernstyrte undervannsfarkoster vant anbudet på prosjektet som ble kalt Draugen Underwater Installation Services, DUIS.
Stolt Nielsen Seaway måtte da gå til en litt uvanlig anskaffelse for å tilfredsstille Shells tekniske spesifikasjoner.
Det var planlagt å bruke fjernstyrte undervannsfarkoster, ROV-er (Remote Operated Vehicles) til å utføre arbeidsoppgavene med plattformen siden metningsdykkere på dette dypet var uaktuelt. Flere typer undervannsfarkoster var aktuelle: enten bemannede systemer som holdt personen som skulle arbeide under vann under atmosfærisk trykk uansett hvor dypt han var – eller ROV-er som ble operert fra et kontrollrom om bord på en rigg eller båt, uten at noe menneske trengte å være under vann.
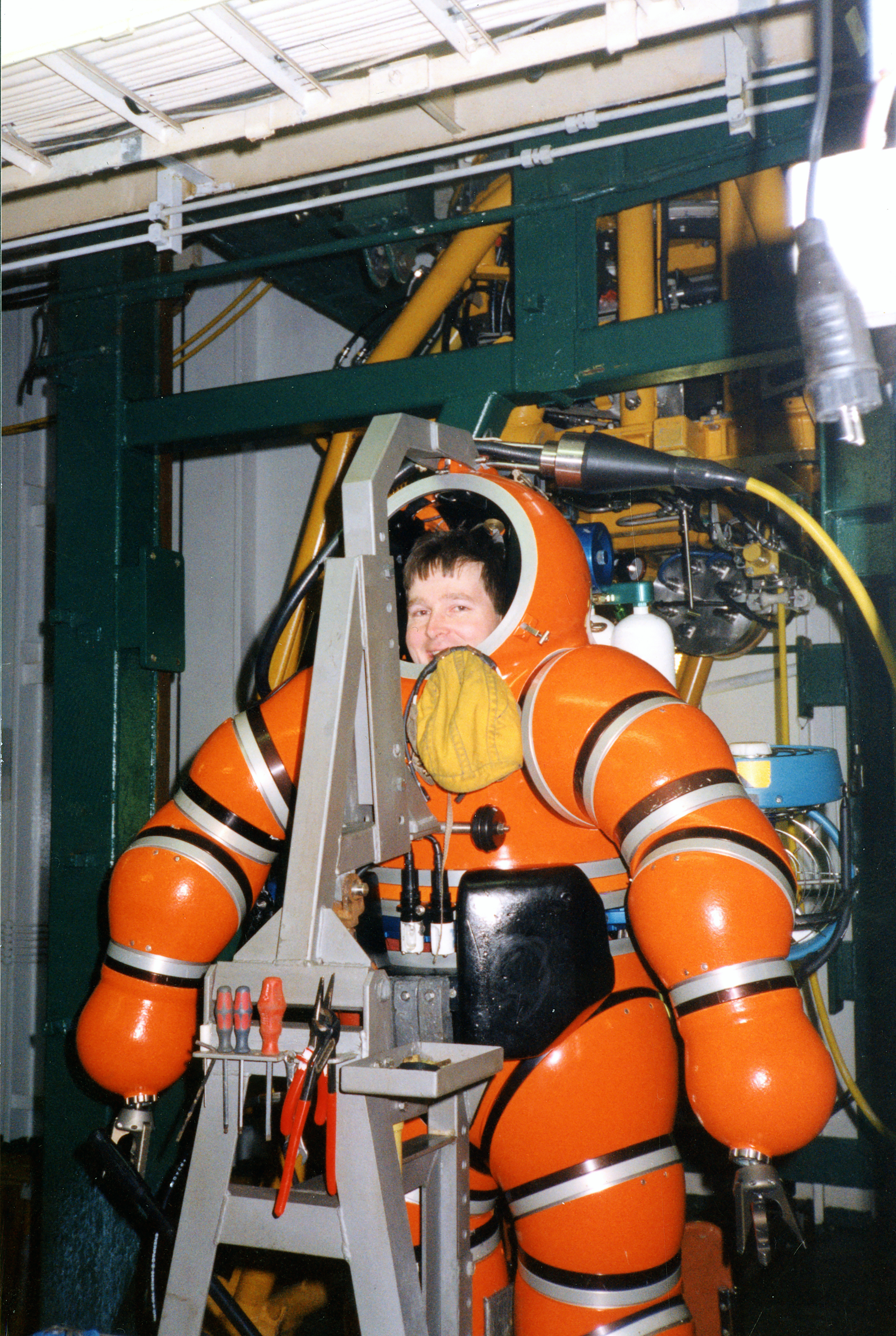 Eric Lutzi prøver en Atmospheric Diving Suit (ADS) – en pansret dykkerdrakt med kabel og løfteutstyr opp til fartøyet. Operatøren / dykkeren stod inni drakten som en astronaut med glasskule over hodet så han kunne se ut. Foto: NOM
Eric Lutzi prøver en Atmospheric Diving Suit (ADS) – en pansret dykkerdrakt med kabel og løfteutstyr opp til fartøyet. Operatøren / dykkeren stod inni drakten som en astronaut med glasskule over hodet så han kunne se ut. Foto: NOMStolt-Nielsen Offshore hadde ROV-er av merket Triton om bord på sine dykkerskip. Dersom ROVen fikk problemer ønsket Shell å ha en backup løsning. Dykking kunne vært et alternativ, men selv om det var foretatt vellykkede testdykk ned til 250 meter og dypere, var det både kostbart og svært omfattende arbeid som måtte til for å vise (kvalifisere) at dykking på slike dyp kunne utføres på en sikker måte.[REMOVE]Fotnote: Joar Gangenes i email til KØG, 13.10.2017. Shell spesifiserte i stedet at selskapet måtte disponere en Atmospheric Diving Suit (ADS) som backup-løsning for å vinne anbudet.
ADS var en pansret dykkerdrakt med kabel og løfteutstyr opp til fartøyet. Operatøren / dykkeren stod inni drakten som en astronaut med glasskule over hodet så han kunne se ut. Han kunne gå nede på havbunnen, men han kunne ikke bevege seg slik en dykker kunne.
Da Stolt-Nielsen Offshore vant jobben, måtte selskapet investere i en slik ADS. Utstyret ble kjøpt fra et Canada-basert selskap gjennom Draeger og var svært kostbart.[REMOVE]Fotnote: Joar Gangenes i email til KØG, 13.10.2017. Det ble kjørt gjennom et testprogram, og det viste seg nesten umulig å få et menneske i denne dykkerdrakten til å gjøre effektivt arbeid. Den ble derfor heller ikke brukt. Heldigvis for Stolt-Nielsen Offshore var Shell villig til å ta hele regningen for både investeringen og testene. De anså dette som forskning og utviklingsarbeid. Kåre Johannes Lie som fulgte opp fra Stolt-Nielsen Offshore sin side synes ikke dette var noe moro. Det var investering i et system som det egentlig ikke var bruk for, noe som var litt synd, forteller han.[REMOVE]Fotnote: Kåre Johannes Lie i intervju med Kristin Øye Gjerde og Arnfinn Nergaard, 09.08.2017.
Installasjonsarbeidet foregikk med bruk av Module Handling System på fartøyet. Det var et system Stolt Nielsen Seaway tidligere hadde utviklet sammen med Elf. Stolt-Nielsen Offshore brukte en nyutviklet kraftig arbeids ROVen i 1990-årene – Perry Tritec Triton, produsert av Oceana Subsea Ltd Perry Inc med base i Florida USA. Den var designet for bruk ned til 1000 meters dybde og var den mest brukte ROV-en på norsk sokkel i 1990-årene.
Selve ROVen var utformet for å kunne foreta undervannsobservasjon, sonar søk, havbunnsundersøkelser og mekaniske arbeidsoppgaver. Triton tillot utskifting av komponenter, en kabel til å heise den opp og ned med som inneholdt nødvendige ledninger for kommunikasjon. Videre var det kabelsnelle, vinsj, kraftoverføringsenhet og kontrollrom.
ROVen hadde to avanserte manipulatorarmer utviklet av Shilling i USA. De ble fjernstyrt via fiberoptikk i kraftkabel til overflaten. Styringssystemet drev en elektrisk pumpe som igjen drev propellene og det øvrige utstyret på ROVen. Hydraulisk drevne thrustere ga fremdrift i sjøen. I tillegg var det egne systemer for å heise ROVen og garasjen (basket) fra dekk og ned i sjøen.
 Triton ble brukt ved undervannsarbeid ved Draugen. Foto: NOM
Triton ble brukt ved undervannsarbeid ved Draugen. Foto: NOM